Sponsored by CSEMOct 23 2020
The Nanoracks Kaber deployment system, installed on the International Space Station, released the RemoveDEBRIS satellite in May 2018. The most complex payload of the 100 kg class satellite was the vision-based navigation (VBN) sensor.
The VBN sensor has been produced in consideration of active debris removal and space rendezvous applications. The architecture of the sensor can also be implemented for use in future space exploration missions with landing on Mars or on the Moon, underwater mapping, unmanned vehicles (such as drones), automotive, forestry management, and cattle applications.
Human activity in space has generated a large amount of garbage over time, to such an extent that it is now an issue for spacefaring countries.
Collisions between orbiting debris and satellites have occurred on multiple occasions. The International Space Station (ISS) changes its orbit almost everyday to avoid the threat of debris.

Figure 1. Launcher tank recovered in South Africa. Image Credit: Argus/Enver Essop.
An estimated 600 pieces of debris weighing 100,000 kg in total re-entered the atmosphere of the Earth in 2014. In just over 50 years, more than 4,800 launches have sent some 6,000 satellites into orbit.
Fewer than 1,000 satellites continue to be in orbit today. The US Space Surveillance Network (SSN) follows and reports on a catalog of over 12,000 orbiting entities. Objects bigger than around 5 to 10 cm in low Earth orbit and 30 cm to 1 m at geostationary altitudes are observed.
Just 6% of the objects in the SSN catalog are active. The most successful way of moderating the number of orbiting debris is by mass reduction in areas that contain high densities of space debris.
An effective solution has developed over the past few years, which is to remove directly objects that are inactive. The EC FP7 RemoveDEBRIS project/mission’s goal was to carry out in-orbit Active Debris Removal (ADR).
The structure of this low-cost mission (€11.3M) included a microsatellite of 100 Kg, known as RemoveSAT. RemoveSAT ejected, then captured and deorbited two targeted space debris, named DebriSATs.
A range of important technologies in deorbiting, rendezvous, and capture were investigated in-orbit, such as net and harpoon and LiDAR-based vision sensor. The success of ADR missions crucially depends on vision-based sensors.
Vision-based sensors enable the main tumbling axis and the geometrical features of the debris to be identified. Without this data, no proximity navigation and capture can be undertaken.
One of the world’s first, and potentially most critical, in-orbit ADR demonstration, RemoveDEBRIS was a crucial prerequisite to attaining the end goal of a cleaner orbital environment on Earth.
CSEM was part of a consortium led by Surrey University’s space department, with Airbus and SSTL as the key space industries. CSEM was in charge of the vision-based navigation (VBN) sensor.
The VBN sensor consists of two sub-systems: a color camera and a flash imaging LiDAR. The camera is an off-the-shelf product, so innovation takes place in the LiDAR.
As the mission is low-cost, the majority of the components are not space qualified. The entire system has been configured and made possible by CSEM.

Figure 2. VBN sensor with laser head, LiDAR receiver, and camera. Image Credit: CSEM
The size of the sensor is 10×10×15 cm3, and its mass is 2 kg. It captured 3D images at distances ranging from 0.5 to above 100 m.
The mission is now completed and RemoveSAT will be destroyed in the atmosphere in the upcoming months. Tens of color and 3D images captured in-orbit are now available. The figure below presents on the left, a LiDAR 3D image or depth map and on the right, a color image captured by the camera with a few seconds delay.
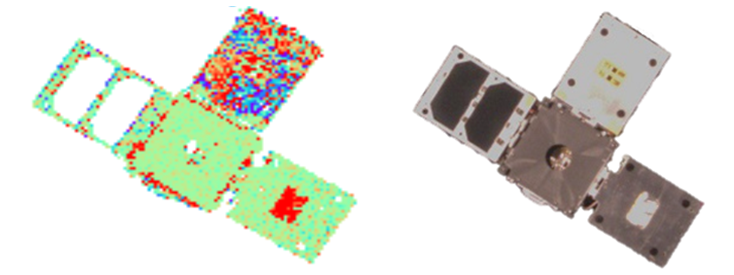
Figure 3. Left, LiDAR image with colors indicating distances. Right, camera image. Image Credit: CSEM
The majority of the distances measured (green spots) on DebriSAT 2 provides the effective RemoveSAT-DebriSAT range of 11.26 m. Blue and red spots indicates wrong distance measurements due to saturation of the pixels concerned by the sunlight. This is also visible on the right hand side, where areas receiving strong sunlight are saturated too.
Distance measurements were achieved over more than 100 m. The measurements are within the specified accuracy below 10 cm at any distance when the sunlight or the light reflected by the Earth does not saturate the detector.
RemoveDEBRIS allowed to demonstrate the simplicity of use of flash imaging LiDAR for ADR and to identify remedies to maintain measurement accuracy in challenging operation conditions with powerful and varying light interferences.
The project has been funded by the Space Research Program of the European Community under grant agreement no. 607099
Acknowledgments
- Produced from materials originally authored by A. Pollini, C. Pache, S. Pernecker, M. Tomil, L. Giriens, G. Perruchoud, F. Droz, J.-L. Nagel, P.A. Beuchat, J. Bennes, and A. de Souza from CSEM.

This information has been sourced, reviewed and adapted from materials provided by CSEM.
For more information on this source, please visit CSEM.